- News
- サービス
自動運転のための「ダイナミックマップ」の生成と配信、KDDIなど3社が実証実験
2018年1月16日
自動運転のクルマに気象情報や事故渋滞情報などを含めた地図情報「ダイナミックマップ」を生成・配信する実証実験をKDDIとゼンリン、富士通の3社が実施する。2018年1月に開始する予定で、2017年12月26日に発表した。
「ダイナミックマップ」は、静的な地図情報に気象や渋滞など刻々と変化する情報を組み合わせたもの。実験では、ダイナミックマップの生成に必要な動的データの収集と分析加工と、データ配信技術を検証する。データ配信技術には4G LTEに加えて、次世代の「5G」の活用を検討する(図1)。
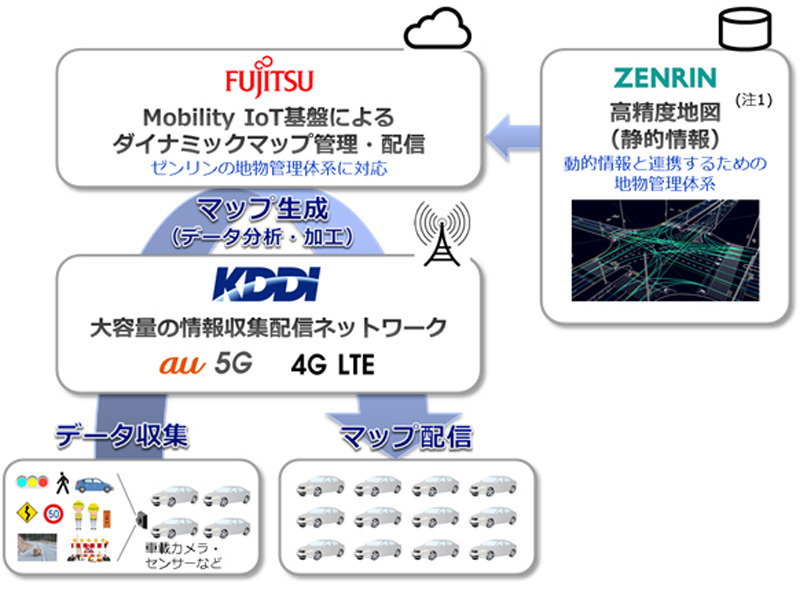
実験でKDDIは、車載通信モジュールと無線通信ネットワークの検証を担当。車載カメラやセンサーのデータを一定間隔で確実に、かつ効率良くアップロードできるかを確かめる。逐次アップデートが必要な動的情報や、地図データの差分を対象車両に確実かつセキュリティを維持しながら配信する方式も検証する。
ゼンリンは、ダイナミックマップの基となる高精度な静的地図データを提供し、そのための基盤である「ZGM Auto」の動作検証を担当。富士通は、ネットに接続した自動車から受信する大量の動的情報を収集し高精度地図に関連付けることと、車両へリアルタイムに配信するためのダイナミックマップの管理機能を提供する。