- UseCase
- 公共
大阪府、ロボット船で川底やダム底の地形を測る実証実験を実施
2017年11月14日
大阪府は、河川管理の精度向上に向けロボットを利用する実証実験を実施する。水上から川底やダムの底の地形を測量することで、維持管理業務の軽減を図る。2017年11月7日に発表した。
日本では、洪水対策として河川の改良工事を実施したり、少雨時の水源としてダム建設も進めたりしてきた。ただ、そうした建設物が今、完成から50年を迎え始めている。老朽化した施設を使い続けるためのコストが発生するほか、維持管理に携わる作業員が定年により退職しており、専門知識を持つ作業員がどんどん減っているのが実状だ。
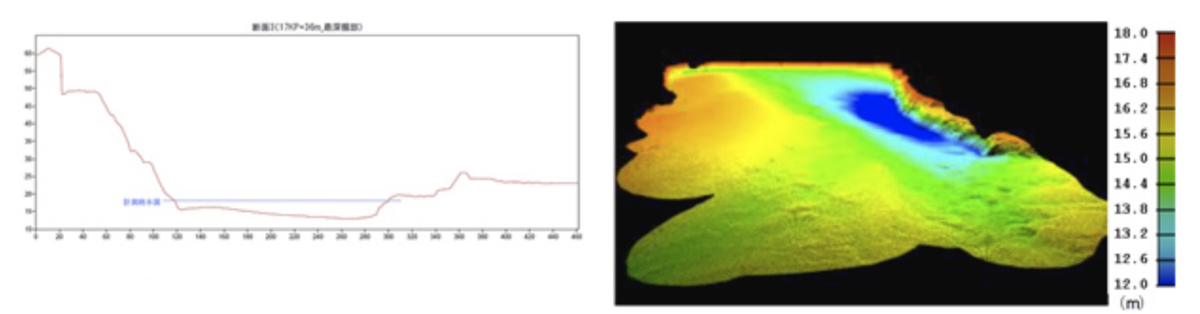
河川やダムの底部の点検は一般に、船上から人が測るか、ダイバーが潜って作業している。しかし、船では活動範囲に限りがあり、測量能力も高くない。測量結果は2次元の断面図が得られるだけである。ダイバーによる作業には常に、事故の危険が付きまとう。
今回の実証では、こうした作業を、センサーを搭載したロボット船により測量する。実験に使うロボット船は、朝日航洋が開発した「フロートロボット」。水中を撮影する光学カメラや、音響測深機などの計測機器を搭載し、自動操縦で水上を動き回る。フロートロボットは、取得した測量データから、水底の3次元モデルを作製する機能も備える。フリーとロボットは、新エネルギー・産業技術総合開発機構(NEDO)の「インフラ維持管理・更新等の社会課題対応システム開発プロジェクト」で開発中のロボット船である。

実験の場は、大阪市城東区東中浜の「平野川分水路」と「第二寝屋川」(11月13日)、および大阪狭山市の狭山池ダム(11月14日、15日)である。いずれも底部の高精度な3次元データを計測する(図2)。分水路と寝屋川では護岸映像も撮影する。
大阪府は、道路や河川といった都市基盤を効率良くかつ効果的に維持するために、ロボットなどの技術開発を支援している。今回はその一環であり、今後は、技術の進歩をみながら、適切な最新技術を導入していくとしている。
| 企業/組織名 | 大阪府 |
| 業種 | 公共 |
| 地域 | 大阪府大阪市城東区、大阪府大阪狭山市 |
| 課題 | 河川管理施設が老朽化した上、維持管理の技術を有する作業員が不足している |
| 解決の仕組み | 水底の地形を測量するロボット船を使い、測量データから3次元モデルを作成して水底の様子を把握する |
| 推進母体/体制 | 大阪府、朝日航洋、NEDO |
| 活用しているデータ | 水底の地形データ |
| 採用している製品/サービス/技術 | 「水中点検用フロートロボット」(朝日航洋製) |
| 稼働時期 | 2017年11月13日から15日 |