- News
- 製造
建設現場のデジタルツインを作成するための自動巡回ロボット、イクシスが開発
2021年5月12日
建設現場の状況を示すデータを取得し、建設業のためのデジタルツインを最新状態に保つための自動巡回ロボットを、ロボットを使ったインフラ支援などを手掛けるイクシスが開発した。日々変化する現場の出来高管理や維持管理を可能にする。2021年4月20日に発表した。
イクシスが開発した「BIM/CIM双方向連動自動巡回ロボットシステム(i-Con Walker)」は、建設現場の3D(3次元)モデルとなるデジタルツインを最新に保つための自動巡回ロボットシステム。測量から設計、施工、検査、維持管理、廃棄・更新までの現場の出来高や出来形、点検結果をデータとして取得することで、業務の高度化や生産性の向上を図る(図1)。
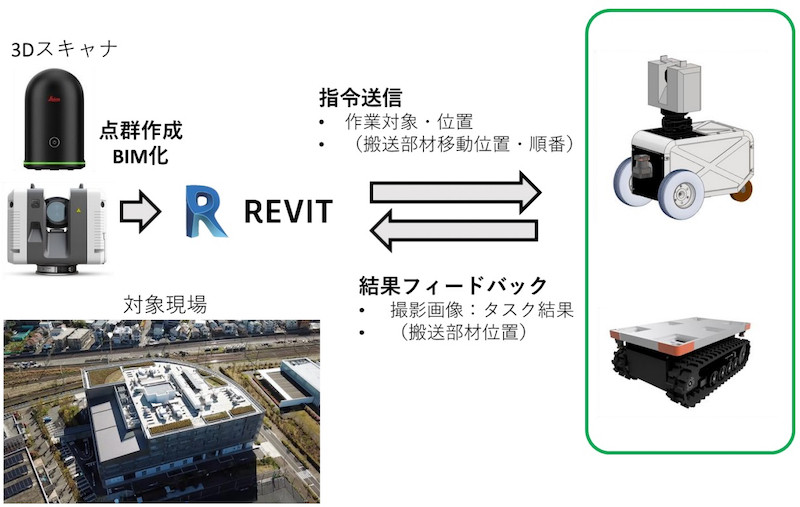
i-Con Walkerの自動巡回ロボットは、設計時に作成したBIM(Building Information Modeling)/CIM(Construction Information Modeling)データに基づいて作成する行動計画に沿って巡回する。その際、部材にひも付けた中継点を連続的に指定する(図2)。途中に障害物があれば、SLAM(Simultaneous Localization and Mapping)技術などにより回避できるという。
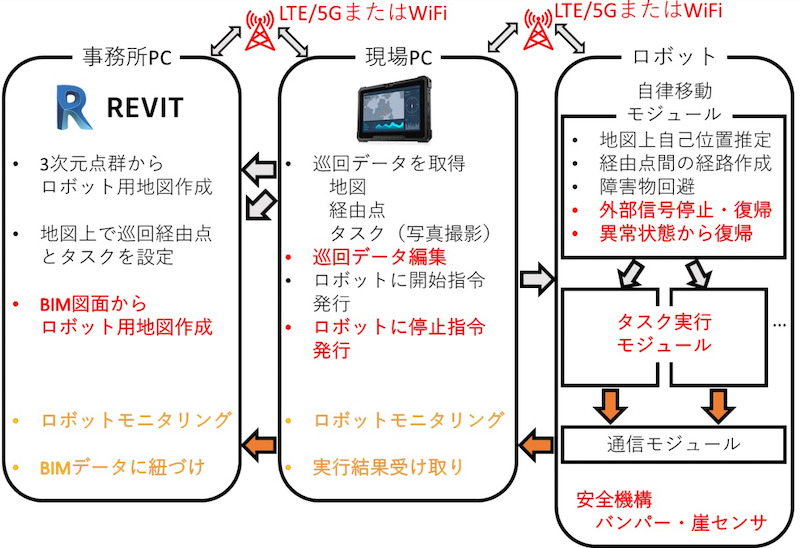
ロボットは各中継点に到着すると、写真撮影や物資移送、施工、3D出来形計測などの指定されたタスクを実行する。その結果をBIM/CIMデータに含まれる部材の属性データとしてIFC(Industry Foundation Classes)形式で反映する。巡回とデータ反映を繰り返すことでBIM/CIMデータを最新状態に保てる(図3)。

最新のBIM/CIMデータをCAD(コンピューターによる設計)ソフトウェア上で確認すれば、遠隔地からでも現場の状況をリアルタイムに観察できる。