- News
- 交通
自動運転システムの安全性を検証するための基盤、NTTデータARCがオープンソースに
自動運転システムの安全性を検証するための基盤ソフトウェアを、NTTデータ オートモビリジェンス研究所(NTTデータARC)がOSS(オープンソースソフトウェア)としてソースコードを無償公開した。自動運転に関わる種々の企業に利用・改修してもらい自動運転システムの開発を促すという。2021年6月22日に発表した。
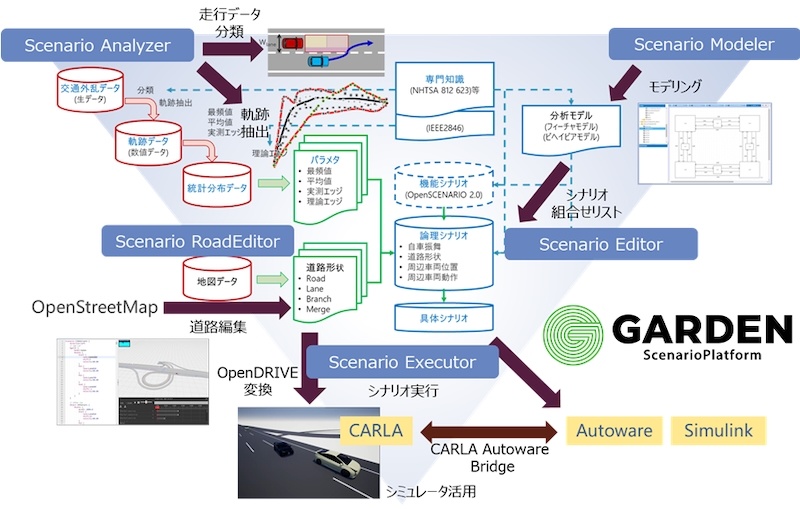
NTTデータ オートモビリジェンス研究所(NTTデータARC)の「GARDEN ScenarioPlatform」は、自動運転システムの安全性を検証するための基盤ソフトウェア。自動運転ソフトウェアが持つ機能の動作をシナリオベースでシミュレーションし、その安全性を検証できるようにする(図1)。
このほど、OSS(オープンソースソフトウェア)として無償で公開した。自動運転システムを制御するためのソフトウェア開発に携わる自動車メーカーやサプライヤーなどの関係者が利用するなかで、GARDEN ScenarioPlatform自体の改修にも期待し、自動運転システムの開発を促すのが目的という。
初回バージョンである「GARDEN ScenarioPlatform acacia」(アカシア)のソースコードは、ソフトウェア開発基盤「GitHub」(米GitHub製)のリポジトリで無償公開し、NewBSDライセンスに基づき利用を許諾する。利用者は、ソースコードに添付されるライセンス条項に同意した上で利用・改修などができる。継続してバージョンアップ版をリリースする予定である。
GARDEN ScenarioPlatformでは、FOT(フィールド実証実験)などから得られる走行データを分析してシナリオを抽出し、統計データからパラメーターの範囲を特定できる。検証シナリオは、抽象度が高いシナリオ記述から、シミュレーションで実行可能な具体的なシナリオへと段階的に記述できる。
シミュレーションでは、自動運転シミュレーターのOSSである「CARLA」を利用する。自動運転用OSSの「Autoware」や、モデリング/シミュレーションソフトウェア「Simulink」(米MathWorks製)との接続実績がある。シナリオベース開発における国際標準フォーマットである「OpenSCENARIO」と「OpenDRIVE」に対応した既存シミュレーターとの連携も想定している。
NTTデータARCは、次世代モビリティ社会に必要な「自動運転システム検証・開発プラットフォーム」の機能群のソフトウェア化を進める研究開発プロジェクト「GARDEN」に参加してきた。GARDEN ScenarioPlatformは、その成果の一部をOSS化したものだ。