- News
- 共通
状況が変化する環境でロボットを協調動作させるためのフィジカルAI技術、富士通が開発
人やモノの配置や動きが変わる複雑な実空間において、人とロボットが安全に協調するためのフィジカルAI技術を、富士通が開発した。カメラ映像から物体間の相互作用を捉えて、空間全体のモデルをリアルタイムで構築する。未来の行動予測から自律ロボットの最適な行動計画の作成までを実現する。2025年12月2日に発表した。
富士通が開発したのは、変化する環境下でも人とロボットが協調動作するためのフィジカルAI(人工知能)技術(図1)。カメラ映像から、その環境下にある人とロボット、および周辺のモノの関係性をリアルタイムに理解し、人の動きやモノの配置が頻繁に変わっても、それぞれが干渉せず安全に動けるようになるという。
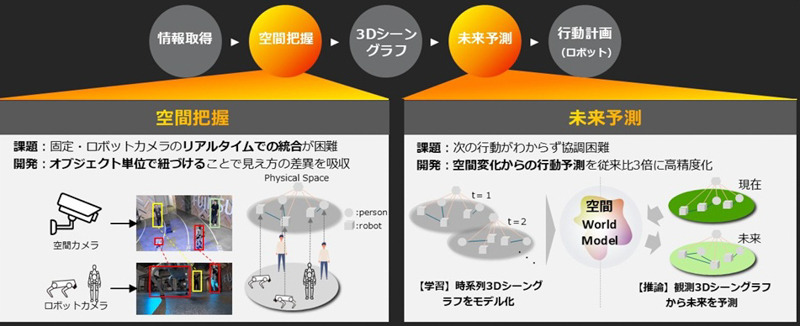
開発した技術の中核にあるのは、富士通が「World Model(ワールドモデル)」と呼ぶ空間モデル。定点カメラやロボットに搭載されたカメラの映像から、視野角やレンズゆがみの影響を抑えながら空間全体を把握し、人・ロボット・モノなどの物体を単位に、それらの関係性をグラフ構造の3D(3次元)シーングラフとしてモデル化する。3Dシーングラフは時系列データとして蓄積し、その変化を継続的に学習する。
World Modelに基づき、人やロボットなどが次に取る行動をシミュレーションし、空間内の未来の状態を予測する。予測結果に基づき、ロボット同士の衝突を回避したり、作業分担を考慮した協調動作のための行動計画を作成したりする。
富士通は、空間を把握するコンピュータビジョン技術を、商業施設における人流解析や防犯分野での異常行動検知などに利用してきた。そこでの知見を自律的な行動に応用するために「空間ロボティクス研究センター」を2025年4月に設立し研究を本格化させた。今回の技術は、同センターの初期成果の1つになる。
富士通によれば、フィジカルAI技術は、労働力不足への対応や生産性向上に向けた自動運転やスマートファクトリーなどへの応用が期待されている。だが現状は、通路や作業領域が規定された工場や物流倉庫での利用が中心で、人の動きが予測しにくく家具や備品などの配置が頻繁に変わる住宅やオフィスなどで使用するロボットには適応が難しい。