- UseCase
- 交通
トヨタの自動運転ソフトを開発するTRI-AD、車載カメラによる高精度地図の自動生成を実証実験へ
2019年4月1日
トヨタ自動車の子会社で自動運転用ソフトウェアなどを開発するトヨタ・リサーチ・インスティテュート・アドバンスト・デベロップメント(TRI-AD)は、車載カメラで撮影した画像から高精度の地図データを自動生成する実証実験を開始する。自動運転用地図などを手掛ける米CARMERAと共同で実施する。2019年2月28日に発表した。
トヨタ・リサーチ・インスティテュート・アドバンスト・デベロップメント(TRI-AD)と米CARMERAが始めるのは、車載カメラで撮影した市街地の画像から、自動運転に必要な道路情報などを提供できる高精度な地図データを自動で生成する仕組みの実証実験。自動生成する地図と、市場に流通している地図を組み合わせることで、より信頼性の高い道路情報の提供を目指す。
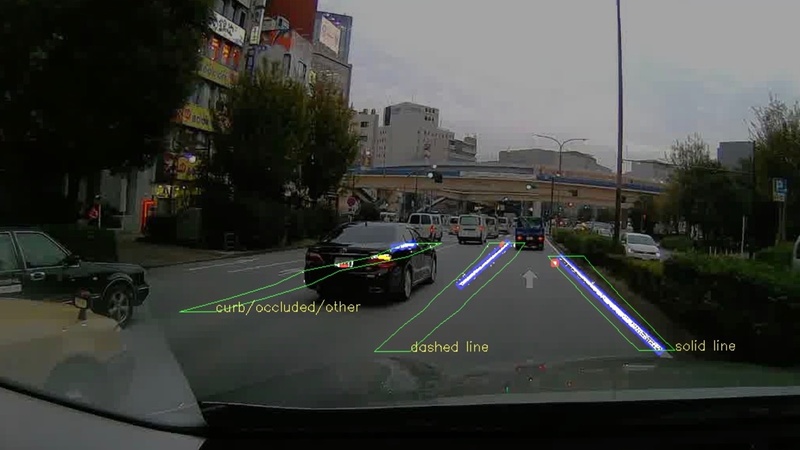
実験では、トヨタが市販車に採用済みの車載カメラを試験車に取り付け、東京の市街地を数カ月間走行し、画像データなどを取得する。その画像データをCARMERAが持つリアルタイム基盤で処理し、高精度の地図を自動的に生成する(図1)。

試験車に搭載するカメラは、トヨタがグローバルに展開する予防安全パッケージ「Toyota Safety Sense」に対応しているもの。市販の通信型ドライブレコーダー(デンソー製)も搭載し、Toyota Safety Senseを搭載していない車両から得られる画像を使った地図の自動生成も実証する。
将来的には、世界中の市販車から取得したデータを基に高精度の地図を自動生成し、あらゆる道路での自動運転の実現を目指す。
TRI-ADは、高精度地図データについては多くの賛同者と共有する構想を掲げている。「Automated Mapping Platform(AMP)」と呼ぶソフトウェア基盤を運営し、その上で、参加企業から得た自動運転車両のデータを共有しながら地図を作るという。今回の実証は、そこに向けた第1歩の位置付けだ。
| 企業/組織名 | トヨタ・リサーチ・インスティテュート・アドバンスト・デベロップメント(TRI-AD) |
| 業種 | 交通 |
| 地域 | 東京都中央区 |
| 課題 | 自動運転には、信頼性が高い道路情報を提供できる高精度の地図が必要 |
| 解決の仕組み | 走行しているクルマに取り付けた車載カメラで得られる画像データから地図を自動で生成する |
| 推進母体/体制 | TRI-AD、米CARMERA |
| 活用しているデータ | 数カ月間にわたって東京の市街地を走行して車載カメラで撮影する画像データなど |
| 採用している製品/サービス/技術 | 「Toyota Safety Sense」対応の車載カメラ、通信型ドライブレコーダー(デンソー製)、地図のリアルタイム生成基盤(米CARMERA製)など |