- UseCase
- 製造
川田工業、建設現場のテレワークを実現する遠隔操作アバターシステムを開発
2020年10月21日
橋梁の設計・製作を事業とする川田工業は、建設現場のテレワーク化に向けたアバターシステムを川田テクノロジーズ、芝浦工業大学と共同で開発する。建設現場の生産性および品質の向上を目指す。2020年10月5日に発表した。
川田工業が開発するのは、建設現場のテレワークを実現するためのアバターシステム。人手による橋梁の測定業務などをリモート化し、建設現場の生産性および品質の向上とともに、建設現場の労働力不足を解決したい考えだ。川田テクノロジーズ、芝浦工業大学と共同で取り組む。
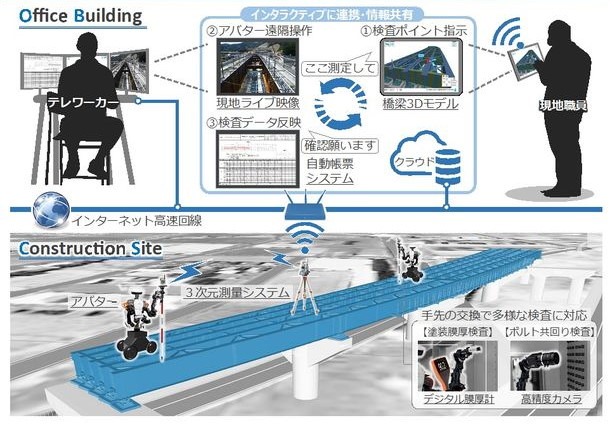
アバターシステムでは、移動型作業ロボットと、遠隔操作端末、移動型作業ロボットが扱う計測器などを高速通信で連結し、建設現場に導入する(図2)。
建設現場のアバターが取得した橋梁の品質・出来高測定データは、クラウドに転送。ロボットの操作者や現場職員、職員および発注者が情報を共有することで、品質・出来高データの取得や現地職員との協働作業を可能にする。帳票も自動で作成できるようにする。
アバターシステムが実現すれば、職員や在宅勤務者が、現場職員に代わって複数の現場における品質・出来高を管理できるようになる。発注者の遠隔立ち会いが可能になることから、工事の生産性と品質保証能力の向上が期待できるとする。
川田工業は、建設現場のテレワークを推進し、品質・出来高管理業務の効率化を図るとともに、一線を引いたベテラン技術者や育児休業中の社員、クラウドワーカーなど、新たな働き手の参加を期待する。
共同開発では、川田テクノロジーズがアバターシステムを基本設計し、芝浦工業大学の我孫子聡子教授(工学部電気工学科宇宙ロボットシステム研究室)がロボット用遠隔操作装置の開発を担当する。川田工業は橋梁工事向けのアプリケーションの開発と現場での実証試験を担う。
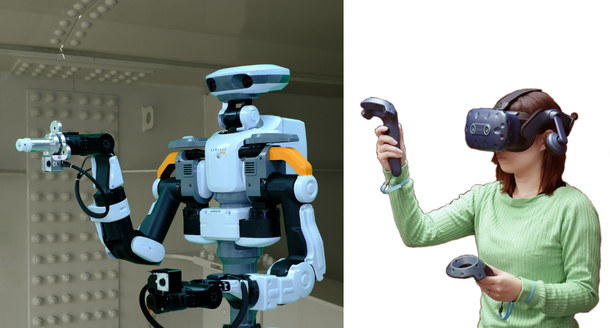
移動型作業ロボットは、カワダロボティクスの「NEXTAGE」を改良して開発した。
| 企業/組織名 | 川田工業 |
| 業種 | 製造 |
| 地域 | 富山県南砺市(本社) |
| 課題 | 人手による橋梁の測定業務の生産性および品質を向上させ、建設現場の労働力不足を解決したい |
| 解決の仕組み | アバターロボットを操作し、遠隔から建設現場の品質・出来高管理や協調作業ができるようにする |
| 推進母体/体制 | 川田工業、川田テクノロジーズ、芝浦工業大学の我孫子聡子教授(工学部電気工学科宇宙ロボットシステム研究室) |
| 活用しているデータ | 橋梁の計測情報や検査情報 |
| 採用している製品/サービス/技術 | アバター技術、移動型作業ロボット、高速通信 |
| 稼働時期 | 2020年10月 |