- UseCase
- 製造
大林組、トンネル工事の現場でバックホウ自律運転システムを実証
大林組はトンネル工事現場での土砂の積み込み搬出にバックホウの自律運転システムを適用する実証実験を実施した。1人のオペレーターが複数台のバックホウを遠隔地から監視・操縦し、搬出作業の省人化を実現できたという。システムは、NECおよび大裕と共同開発した。2021年9月13日に発表した。
大林組が実施したのは、トンネル工事で掘り出した土砂を現場から運び出しダンプトラックに積み込むまでを自動化する自律運転の仕組みの実証実験。トンネル現場に複数台のメーカーが異なるバックホウを投入し、土砂ピット内に堆積した土砂を掘削してからダンプトラックに積み込んだ(図1)。
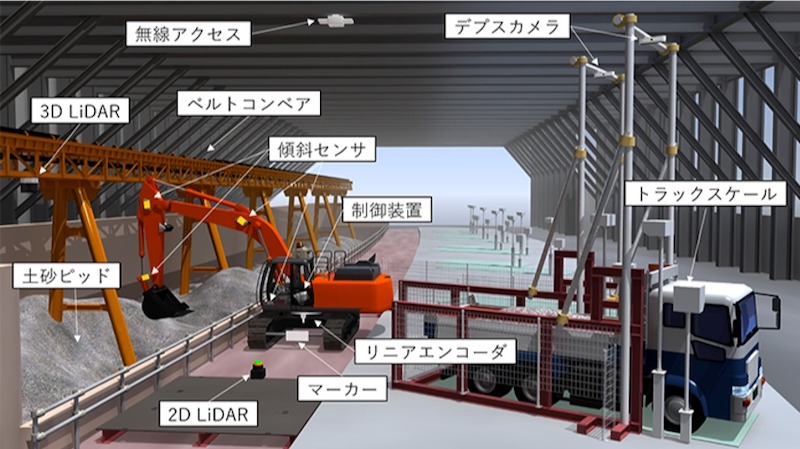
実証では新機能として、センサーを活用してピット内の土砂形状から土砂を最適な位置にかき寄せる機能や、掘削したバケット内の土砂堆積を推定する機能を開発した。バックホウの動作を高精度で制御することで、正確な掘削作業と公道運搬に適した荷姿への整形なども実現した。
バックホーの自律運転は、現場に備え付けたボタンをダンプトラックの運転手が押すと始動し、一定量の積み込みが完了すると停止する。バックホウに搭載する自律運転システムは、ダンプトラックのベッセル(荷台)の形状を深度カメラで認識して積み込みを制御することで、ベッセルの形状が異なるダンプトラックに適応できるという。

自律運転中は、遠隔地にいる1人のオペレーターが、施工現場にある複数台のカメラで撮影した俯瞰映像や、バックホウの姿勢・状態、掘削エリアとダンプトラックに積み込んだ土砂の形状などをモニター画面越しにリアルタイムに監視する(図3)。自律運転を遠隔操縦に切り替えて、オペレーターがカメラ映像や作業音などをもとにバックホウを操作することもできる。

大林組とNEC、大裕の3社は2019年から、センシング技術を統合管理する「ネットワークドコントロールシステム」やバックホウの自律運転システムを開発してきた。そこではNECの「適応予測制御技術」や、大林組と大裕が共同開発した対象機種やメーカーを問わない汎用遠隔操縦装置「サロゲート」を利用している。
3社は今後、施工現場への実適用に加え、台数を増やしてのさらなる生産性の向上や屋外環境への対応、他の建設重機との連携などに向けた技術拡張に取り組む。
| 企業/組織名 | 大林組 |
| 業種 | 製造 |
| 地域 | 東京都港区(本社) |
| 課題 | トンネル工事現場における掘削した土砂の積み出し作業の生産性を高めたい |
| 解決の仕組み | 自律運転ができるバックホーを開発し、1人のオペレーターによる監視/遠隔操縦ができるようにする |
| 推進母体/体制 | 大林組、NEC、大裕 |
| 活用しているデータ | 建設現場に設置したカメラからの俯瞰映像やバックホウの姿勢・状態を示すデータ、掘削エリアとダンプトラックに積み込んだ土砂の形状など |
| 採用している製品/サービス/技術 | センシング技術を統合管理する「ネットワークドコントロールシステム」(大林組とNEC、大裕が開発)、「適応予測制御技術」(NECが開発)、汎用遠隔操縦装置「サロゲート」(大林組と大裕が開発) |
| 稼働時期 | 2021年 |