- UseCase
- 交通
長野電鉄、線路への追加設備不要な自動運転システムを東芝インフラと共同開発
長野電鉄は、線路内への設備追加が不要な自動運転システムを東芝インフラシステムズと共同で開発している。2023年8月から2024年2月にかけて実施した実証実験では、免許を持たない係員が乗務する「自動化レベルGOA(Grade of Automation)2.5」での基本動作を確認した。東芝インフラシステムズが2024年7月16日に発表した。
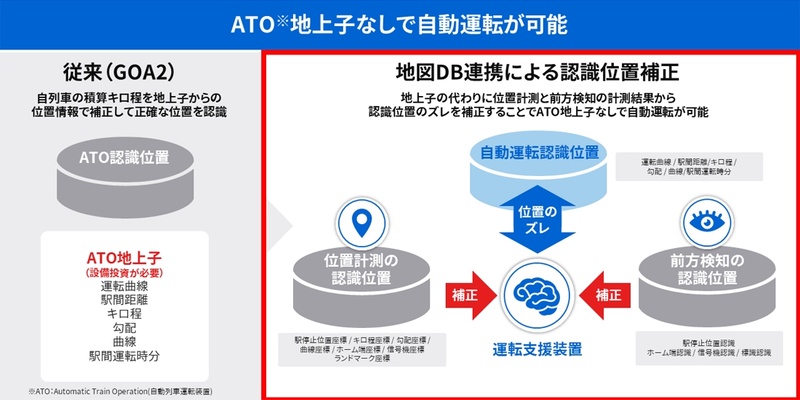
長野電鉄と東芝インフラシステムズが開発しているのは、列車の自動運転を線路上に特別な装置を設置することなく実現するためのシステム。一般に、列車の自動運転では車両の走行位置を正確に把握するために、車両と地上の間で伝送するための「地上子」を設置するが、地上子の設置・維持にかかるコストが懸念されている。
この課題に対し東芝インフラシステムズは、地上子が不要なシステムを開発した。列車の走行位置を高精度に測定・推定し、その位置情報を線路地図データベースと照合することで、加減速や停車を制御する仕組みである(図1)。
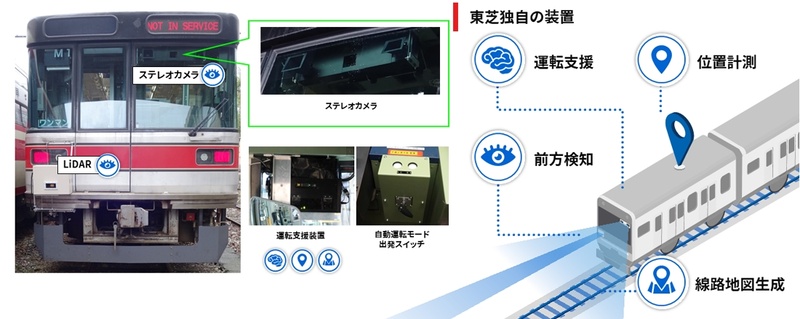
位置の測定には、(1)GNSS(Global Navigation Satellite System:汎地球測位航法衛星システム)とIMU(Inertial Measurement Unit:慣性計測装置)を搭載する位置計測装置、(2)前方検知用ステレオカメラ、(3)LiDAR:Light Detection and Ranging:光による検知と測距)、(4)画像処理を使用する(図2)。
長野電鉄の長野線の一部区間(都市部)で2023年8月から2024年2月にかけて実施した実証実験では、免許を持たない係員が乗務する「自動化レベルGOA(Grade of Automation)2.5」を想定し、加減速の制御および停車駅での停車制御を検証した(図3)。停車位置の精度は±50センチメートル以内を達成した。
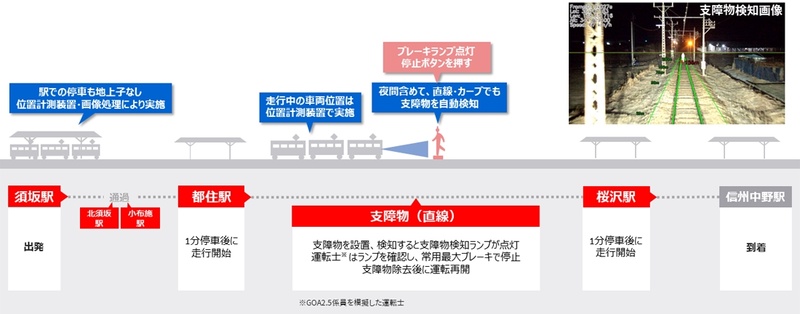
実験では、模擬支障物を前方検知用ステレオカメラで検知し、その通知を受けたGOA2.5の乗務員が手動で停車させる試験も行った。夜間に時速70キロメートルでの走行中に前方200mメートルに支障物があっても、支障物までに停車できることを確認した。通常、夜間に人間が視認できる距離は110~130メートルだという。
カメラによる支障物検知では、曲線区間でも機能するよう、列車位置に連動するカーブ用補助灯をコイト電工と共同開発してもいる。
実験では、逆光や対向照明などカメラによる撮影が困難な条件下でも300メートル先の障害物を安定して検知するために、LiDARを追加した前方検知システムも検証した。LiDARには、東芝の研究開発センターが開発する「長距離高解像測距技術」を搭載した。
今後は、ステレオカメラの画像情報やLiDARの測距データを用いて300メートル先の支障物検知を実現する計画である。地形や天候の影響を考慮し、列車位置に応じて最適なセンサーを自動的に選択する技術も開発する。将来的には、乗務員が先頭車両以外に乗務する「GOA3」以上の自動運転システムへの対応を目指す。
| 企業/組織名 | 長野電鉄 |
| 業種 | 交通 |
| 地域 | 長野市(本社) |
| 課題 | 列車の自動運転では車両位置を正確に把握するために、線路内に地上子を設置する手法が一般的だが、地上子の設置・維持管理にコストがかかる |
| 解決の仕組み | 地上子の設置が不要な列車の自動運転システムを開発する |
| 推進母体/体制 | 長野電鉄、東芝インフラシステムズ |
| 活用しているデータ | 車両の走行位置および線路上の支障物の情報など |
| 採用している製品/サービス/技術 | GNSS(Global Navigation Satellite System:汎地球測位航法衛星システム)とIMU(Inertial Measurement Unit:慣性計測装置)を搭載する位置計測装置、ステレオカメラ、LiDAR:Light Detection and Ranging:光による検知と測距)、画像処理 |
| 稼働時期 | 2024年2月(GOA2.5での実証実験の終了時期) |