- News
- 製造
建設現場をロボットで点検する仕組みの実証実験、イクシスと日本無線がローカル5G使い実施
2022年8月23日
建設現場をロボットが自動巡回して点検し遠隔地からリアルタイムに確認するための仕組みの実証実験を、ロボットによるインフラ支援などを手掛けるイクシスと日本無線が共同で実施した。データをリアルタイムに共有できるようローカル5G(第5世代移動体通信サービス)環境を構築した。2022年4月13日に発表した。
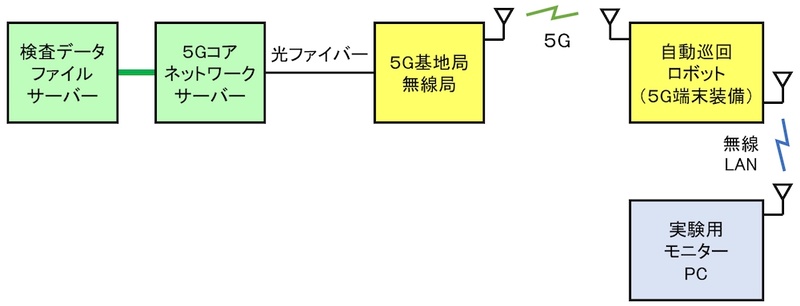
ロボットを使ったインフラ支援などを手掛けるイクシスと日本無線が共同で実施したのは、建設や建物管理の現場をロボットが自動巡回し、点検結果を遠隔地からリアルタイムに確認する仕組みの実証実験。自動巡回ロボット「i-Con Walker」(イクシス製)を、日本無線の長野事業所 先端技術センターにあるローカル5G(第5世代移動体通信サービス)環境で動作させて実験した(図1)。

実験では、フロアに点検箇所を示した巡回ルートに沿ってロボットが自動走行し、搭載したスキャナーにより位置情報を持つ点群データを取得・収集した(表1)。
| 工程 | 取得データ |
| 施工段階 | 現場の地形情報、資材などの配置状況、施工の進捗具合 |
| 完成段階 | 建築物などの実寸情報、建築物などの外観情報 |
| 維持管理段階 | 建造物などの保全状況、建築物などの利用状況 |
結果、複数現場の施工状況や検査データ、点検状況を遠隔地にあるPCから確認できた。ローカル5G経由でデータをアップロードしたことで、変化する現場の状況をリアルタイムに共有できたとする(図2)。現場のデジタルツインとなる3次元のBIM(Building Information Modeling)/CIM(Construction Information Modeling)データにも、点検状況をリアルタイムに反映できたという。
ローカル5G環境であれば、4K映像や360度カメラを使って建物の細部を示すデータを取得でき、点検品質と作業性の向上が期待できるとしている。
イクシスらによれば、インフラ分野の施工や完成、維持管理において現場の状況をロボットで取得する動きが進んでいる。ただ外部メモリーなどを使ったデータ共有では手間と時間がかかるほか、記録データが大容量のためBIM/CIMデータへの反映には通信インフラの確保が課題になっている。