- Column
- 欧州発の都市OS「FIWARE」の姿
人との共存が期待されるロボットの連携基盤にもなるFIWARE【第5回】
会津大学とTISのロボット連携の共同実験

前回、都市OS(基本ソフトウェア)としての「FIWARE」の活用例として、スペインのサンタンデール市とポルトガルのリスボン市という2件のスマートシティを紹介しました。今回はFIWAREをロボットの制御基盤としている、会津大学とTISの共同実証の内容を紹介します。訪問時の受付から案内までをロボットが連携して担当する仕組みです。将来は都市においても、ロボットとの共存が当たり前になることでしょう。
会津大学とITサービス大手のTISが、都市OSとしても機能する「FIWARE」を使って実証に取り組んだのは、「受付案内ロボット連携システム」です。複数台のロボットが連携しながら、来訪者を受付から訪問先まで案内できるかの実証実験を2018年度に実施しました。
ロボット単体では業務の全プロセスを補い切れない
実験の内容は、こうです(図1)。会津大のある棟の1階と2階に受付用ロボと誘導ロボを1台ずつ配置。1階の受付ロボが来訪者を受け付け、その情報を引き渡しながら、1階の誘導ロボがエレベーターまで案内します。
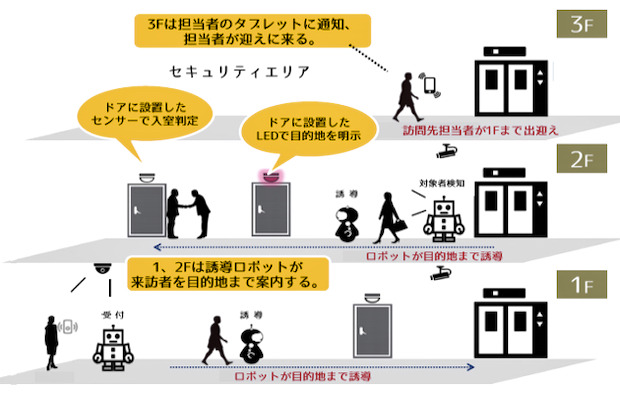
エレベーターを2階で降りた来訪者を、2階の受付ロボが再度確認し、2階の誘導ロボが予定の居室まで案内します。併せて訪問先の居室前のLED照明も、ロボット連携の仕組みで点灯させます。
さらに、3階をロボットも来訪者も入れない「セキュリティフロア」とし、その3階にいる応対者には、ビジネスチャットツールの「Slack」を介して来客を知らせます。
TISが複数ロボットの連携にこだわるのは、労働力不足をロボットで補おうとしても、企業が必要とするすべてのプロセスをロボット単体では補い切れないからです。適材適所にロボットを配置し、それらが連携することで、業務プロセスの一部を代替・拡張。さらにロボットが代替できないフローを人が担う「人とロボットの役割分担」の成立を目指します。
その仕組みの実現に向けTISは、ロボット制御の連携基盤であるRPaaS(Robotics Platform as a Service)としての「RoboticBase」をFIWAREベースで開発しました。将来的には、各種業務システムや都市インフラなどとの連携を想定するためです。
FIWAREをベースにすることで、RoboticBaseにも「ビルディングブロック思想」(第3回参照)が生かされています。たとえば「Orion」や「Cygnus」などFIWAREのソフトウェアコンポーネントである「GE(General Enabler)」を中心に、シナリオに沿って必要なビジネスロジックを追加しています。
加えて、他のプラットフォームとの組み合わせが容易なのもFIWAREの特徴が生きています。具体的には、ロボット用のソフトウェア基盤である「Robot Operating System (ROS)」とは、M2M(Machin to Machine)/IoT(Internet of Things:モノのインターネット)向けの通信プロトコルの1つである「MQTTS」を使って連携しています。