- Column
- Well-beingな社会に向けたロボットの創り方
操縦型ロボットは今、アバターとしての幕を開ける【第3回】
遠隔作業により空間の制約を超える
こうした流れは、新型コロナによる非接触ニーズの高まりもあり、しばらくは継続されるであろう。Afterコロナの世界においても、遠隔作業により空間の制約を超えられるという価値はあり続ける。
空間の制約を超えるということは、これまで遠くにあって、できなかった作業を近くからできるということであり、逆に、近くで行うのが当たり前だった作業が遠くからでもできるということだ。後者は、サービス業などでの業務が該当することになる。
特に、世界で最も人件費が安い場所から、もしくは時差などが関係なく最も採用しやすい場所から、必要な労働力を遠隔で確保できるという点において、経済的合理性の観点からも導入が進む可能性は大いにある。
一方で、操作型ロボットは、ヒト1人が1体を操作する1 : 1の関係で実施していては生産性が上がらないという課題もある。つまり、生産性を向上させるためには、ロボットを操作するヒトは、自分の身体と他のロボットを同時に操作するか、複数のロボットを同時に操作する必要がある。
自分の身体とロボットを同時に操作するというのは、少しイメージが湧きにくいかもしれない。そのアプローチの例に、著者らが、2人分の作業を1人でできるように開発を進めている「第三の腕」がある(写真2)。

1:1を超える生産性を実現するためには、技術的には「Shared Autonomy」「Shared Control」という技術が重要になってくる。これらの技術は、自動運転車などの領域でも使われるため、耳にしたことがある読者もいるだろう。ヒトがロボットのすべてを操作するのではなく、ロボットが自らが置かれている場所で、ある程度、自律的に動けるようにする技術だ。
これらの技術が確立されれば、基本的にはロボットが自律的に判断・作業し、ロボットにとっては難しい作業、すなわち、タスクそのものが難しい作業や、タクスの開始やエラー復旧作業などヒトが確認したほうが良い作業だけをヒトに切り換えて作業できるようになる。
Shared Autonomyにより、ロボットの自律制御とヒトの自律制御を組み合わせることで、操作者の認知的な負荷を高めることなく、1人でN体のロボットをコントロールする1:Nの作業が可能になる。
操縦者とアバターつなぐプラットフォームが重要に
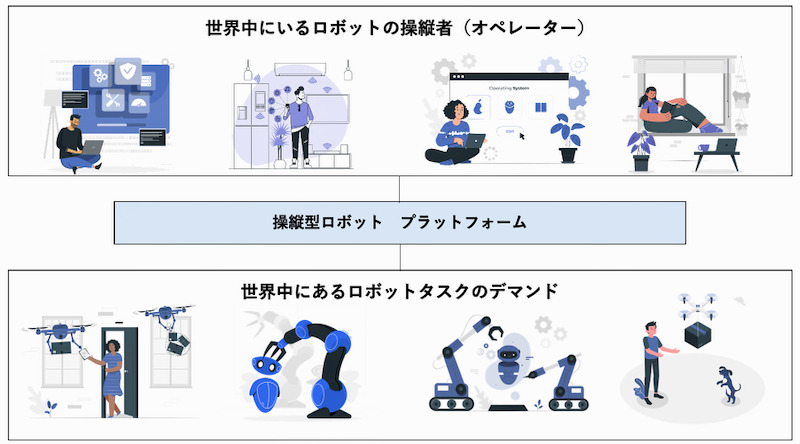
1:Nなどの形で導入が進んでいく操縦型ロボットは、将来的にはN:Mという形になっていくであろう。つまり、N人の操縦者(オペレーター)がM体のロボットを操作する世界だ。このような複数と複数が混ざりあう世界感において必要なデジタル技術はプラットフォーム技術である。
図1に示すように、世界中にいる操作者と世界中にあるアバターロボットを結びつけるプラットフォームは今後、重要になってくる。既にTelexistenceは、米Microsoftのクラウドサービス「Microsoft Azure」を使って、コンビニなど小売店向けプラットフォーム「Augmented Workforce Platform(AWP:拡張労働基盤)」を発表している。
AWPそのものの全貌は、まだ明らかにはなっていない。おそらく最終的には、世界中の労働力と仕事をマッチングさせるプラットフォームとして、さらにはフィジカルなロボットだけではなく、サイバー空間でのアバターなども含めて、さまざまなタスク実行される基盤になっていくだろう。
少し言い過ぎかもしれないが、もしかすると、操縦型ロボットおよび操縦型ロボットをつなぐプラットフォームは、SF作家のNeal Stephenson(ニール・スティーヴンスン)氏が提唱した「Metaverse(メタバース)」を、サイバー空間だけではなく、フィジカル空間をも巻き込んで実現する壮大な新世界の重要な起点になっていくかもしれない。
そのような視点で見てみると、操縦型ロボットもデジタルトランスフォーメーション(DX)を進めるための重要なパーツであり、非常に面白い存在になっていくだろう。

安藤健(あんどう・たけし)
パナソニック マニュファクチャリングイノベーション本部ロボティクス推進室総括。パナソニックAug Labリーダー。博士(工学)。早稲田大学理工学術院、大阪大学大学院医学系研究科での教員を経て、パナソニック入社。ヒトと機械のより良い関係に興味を持ち、一貫して人共存ロボットの研究開発、事業開発に従事。早稲田大学客員講師、福祉工学協議会事務局長、日本機械学会ロボメカ部門技術委員長、経済産業省各種委員なども務める。「ロボット大賞」「IROS Toshio Fukuda Young Professional Award」など国内外での受賞多数。