- Column
- Industrial IoTが求めるシカケの裏側
自動車の制御/センサーデータ収集におけるペイロード設計【第4回】
ファストデータの遠隔収集の課題解決(その2)
前回から、モバイルネットワークを介した遠隔データ収集における、さまざまな課題の解決について、自動車の制御/センサーデータの回収をユースケースに解説している。今回は、自動車の制御信号を計測する際のデータ伝送のペイロード設計について解説する。
Remote Data Acquisition(遠隔データ収集)の例である自動車の制御信号の計測において、データ伝送路をどう確保するかは重要な検討課題の1つである。
そこで以下では、ある自動車(車両A)の制御信号計測をサンプルに、データ伝送のペイロード設計を検証してみよう。まずは、車両データ計測のサンプルシナリオを整理する。
【車両から取得される制御データの条件】
計測対象となる車両Aからのデータは、3つの制御バス(CAN:Controller Area Network)の全データとする。
制御バス1:秒間CANデータ数は約2000個
制御バス2:秒間CANデータ数は約2000個
制御バス3:秒間CANデータ数は約2000個
さらにCANデータには、時系列データを管理・処理するうえで必要なタイムスタンプがない。車載ゲートウェイで、すべてのデータにタイムスタンプを付与することとする。
【ユースケース】
このデータ収集におけるユースケースには、大きく以下の2つがある(図1)。
ユースケース1:全データをサーバーに回収し、データベースに蓄積されたデータを解析ツールなどに取り込んで解析用に活用する(図1の青矢印の経路)
ユースケース2:データ回収に加え、監視用のアプリケーションから計測データをリアルタイム確認する(図1の赤矢印の経路)
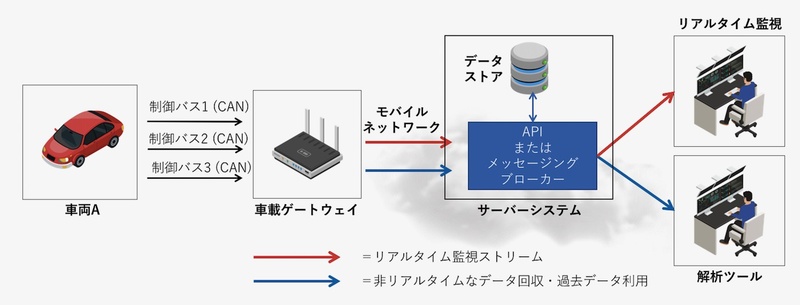
ユースケース1では、データをサーバーに回収することが目的であり、リアルタイム性は要求されない。一方、ユースケース2では、サーバーへのデータ回収と同時にリアルタイムストリームとして監視アプリケーションにまでデータを流す必要がある。
伝送するペイロード量と帯域を計算する
こうしたシナリオに対応するうえで、データ伝送の方法を検討する際に考慮する主なポイントは以下の5つである。
ポイント1:発生データの総量
ポイント2:回線の平均帯域想定
ポイント3:目的に応じたトランスポートプロトコルの選択
ポイント4:データの圧縮率
ポイント5:必要帯域の想定
各ポイントについて、それぞれ内容を確認してみる。なお、本サンプルケースでは弊社が実際に実測した車両AのCANバス上のデータ量を基にする。