- Column
- シン・物流、DXで変わるロジスティクスのこれから
輸送効率を高めるパレットの位置をデジタルで可視化する【第11回】
アクティブRFIDタグを使い非GPS環境下でも位置を把握
物流センターのおけるパレット荷の格納・保管では、庫内の固定ラックなどの位置とパレット荷の紐付けにRFIDタグを導入する動きが広がっています。物流の全プロセスにおいてパレット荷の状態を常に把握できれば紛失を防止できるだけでなく、流通在庫の把握も容易になります。
パレットには、自ら920メガヘルツ帯の電波を発信する「アクティブRFIDタグ」を装着し、それと通信ができる無線リーダーを物流センターなどに設置します。無線リーダーは約300メートルの範囲にRFIDタグを装着したパレットが存在するかどうかをリアルタイムに把握します。
リピーターを庫内の柱などに複数個所配置し受信電力を測定すれば、どのRFIDタグが最も接近しているかが分かります(図1)。この機能を利用することでGPS(全地球測位システム)が利用できない環境下でも約10メートルの精度で位置を確認できます。
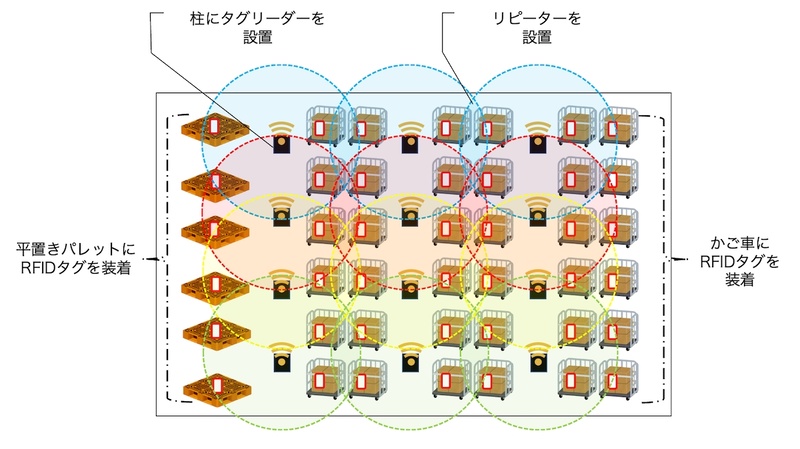
フォークリフトと連携すれば、パレット平置き貨物の位置管理にも応用できます。フォークリフトにリピーターを搭載し、平置き荷物を捌くときにリピーターとパレットが通信することでパレットの位置情報を把握します。
画像認識技術を使いパレットの計数作業を自動化
工場からの出荷時、トラックドライバーは、搭載した荷物とパレットの枚数や種類を目視で確認しています。この作業だけで15分程度かかるとされ、出発時刻が遅れるリスクがあります。確認した計数データは、倉庫作業者が現場のPC端末などに入力して管理しますが、データ入力ミスが発生する可能性もあります。同様の作業は納品時にも発生します。
この目視確認を自動化するために、画像処理技術を使ってパレットの枚数を確認する仕組みが開発されています(図2)。撮影画像も同時に送信・保存することで後日の確認を含め、作業工数の削減と作業品質の向上が可能になります。ただし、判別精度を高めるには事前に多くのパレットデータを使ったAIモデルの学習は必要です。
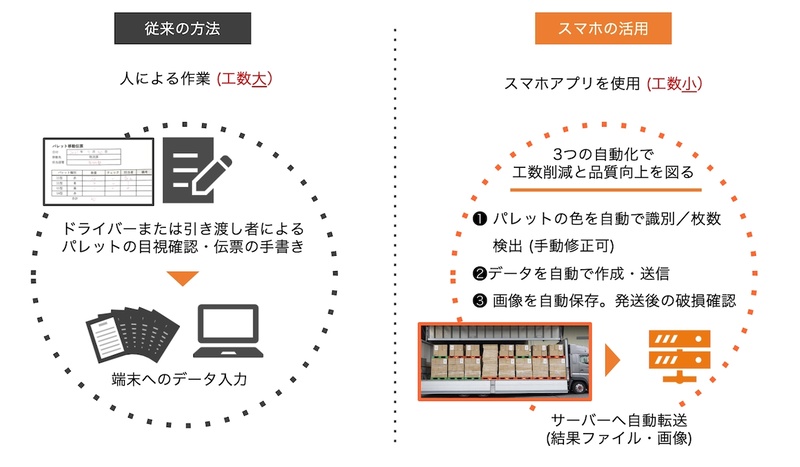
最近はスマートフォンのカメラ機能の高性能化が進んでおり、スマホで撮影した画像からパレットを識別し枚数を検出できるようになっています。スマートフォン用アプリケーションとして提供することで、ドライバーが保有するスマホを使った作業が可能になり、専用の読み取り装置などは不要です。
このようにパレット管理にも、さまざまな位置情報を把握する仕組みの導入が進んでいます。位置測位に温度や湿度、加速度などの各種センサーデータを組み合わせれば、移動中のモノの状態をリアルタイムに把握できるようになります。これまでバッチ(まとめ)処理中心だった物流業務も、よりリアルタイム(都度)処理へとシフトしようとしているのです。
鈴木 邦成(すずき・くにのり)
日本大学教授、物流エコノミスト。博士(工学)(日本大学)。早稲田大学大学院修士課程修了。日本ロジスティクスシステム学会理事、日本SCM協会専務理事、日本物流不動産学研究所アカデミックチェア。ユーピーアールの社外監査役も務める。専門は、物流・ロジスティクス工学。主な著書に『物流DXネットワーク』(中村康久との共著、NTT出版)『トコトンやさしい物流の本』『シン・物流革命』(中村康久との共著、幻冬舎)などがある。
中村康久(なかむら・やすひさ)
ユーピーアール株式会社技術顧問。工学博士(東京大学)。NTT電気通信研究所、NTTドコモブラジル、ドコモUSA、NTTドコモを経て現職。麻布高校卒業後、東京大学工学部計数工学科卒業。元東京農工大学大学院客員教授、放送大学講師。主な著書に『Wireless Data Services-Technology, Business model and Global market』(ケンブリッジ大学出版)、『スマートサプライチェーンの設計と構築』(鈴木邦成との共著、白桃書房)、『シン・物流革命』(鈴木邦成との共著、幻冬舎)などがある。