- Column
- Industrial IoTが求めるシカケの裏側
Industrial IoTが扱う「ファストデータ」の特性【第1回】
主なシナリオは遠隔データの収集と遠隔制御の2つ
産業シーンでのM2M/IoTの基本シナリオは(1)遠隔データの収集・分析・活用系と(2)遠隔制御系の2つに大別される。
(1)遠隔データの収集・分析・活用系のユースケース
ファストデータの収集・分析・活用系ユースケースに自動車の遠隔診断への取り組みがある。
自動車の制御システムは近年、高度に電子化されクルマ1台からおびただしい量の時系列データが創出されている。自動車の制御ネットワークはCAN(Controller Area Network)と呼ばれるバスシステムで構成される。CANは、自動車の電子制御を司る複数のECU(Electronic Control Unit)を中心に、駆動制御、ボディ制御、安全制御といった制御システム別にネットワーク化されている。
制御ネットワークであるCANとは別に、OBD(On-board diagnostics)と呼ぶ自己診断規格がある。現在では、ほぼすべての車種に実装されている。例えば、車両の定期点検時や車両の調子が悪いとき、ディーラーのエンジニアは車両に備えられたOBDコネクターに診断装置を接続することで、ECUから必要な診断情報を取得できる。
しかし、中にはOBDによる診断だけでは判断できないケースがある。そうした場合は、利用者の協力のもと、CANそのもののデータをデータロガーを使って回収し解析に回す。そこからECUプログラムのバグが発見されるケースも少なくない。
詳細な解析が必要な場合にも、RAWデータレベルの伝送ができるシステムが車両に組み込まれていれば、データ回収から解析までの大幅な時間短縮が図れるとともに、市場に出回っている製品の正常稼働や異常の再現などをリアルタイムに確認できる(図4)。
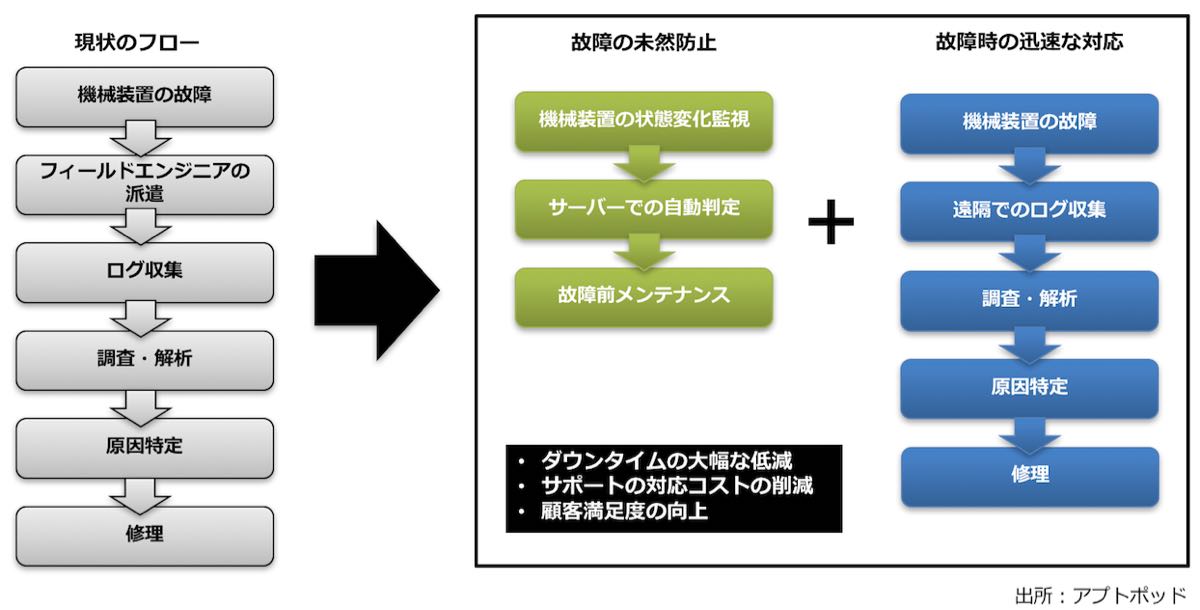
車両の深部に至るデータを基に、利用者向けにさらに踏み込んだメンテナンス情報サービスを提供することも可能になる。さらには機械学習などにより、微妙な制御信号の変化から故障の発生をリアルタイムに予測することもできるようになる。こうしたファストデータによる詳細な遠隔診断を目指した取り組みは自動車だけでなく、重機や建機、農機、ロボティクスなど産業機械全般で広がりを見せつつある。
(2)遠隔制御系のユースケース
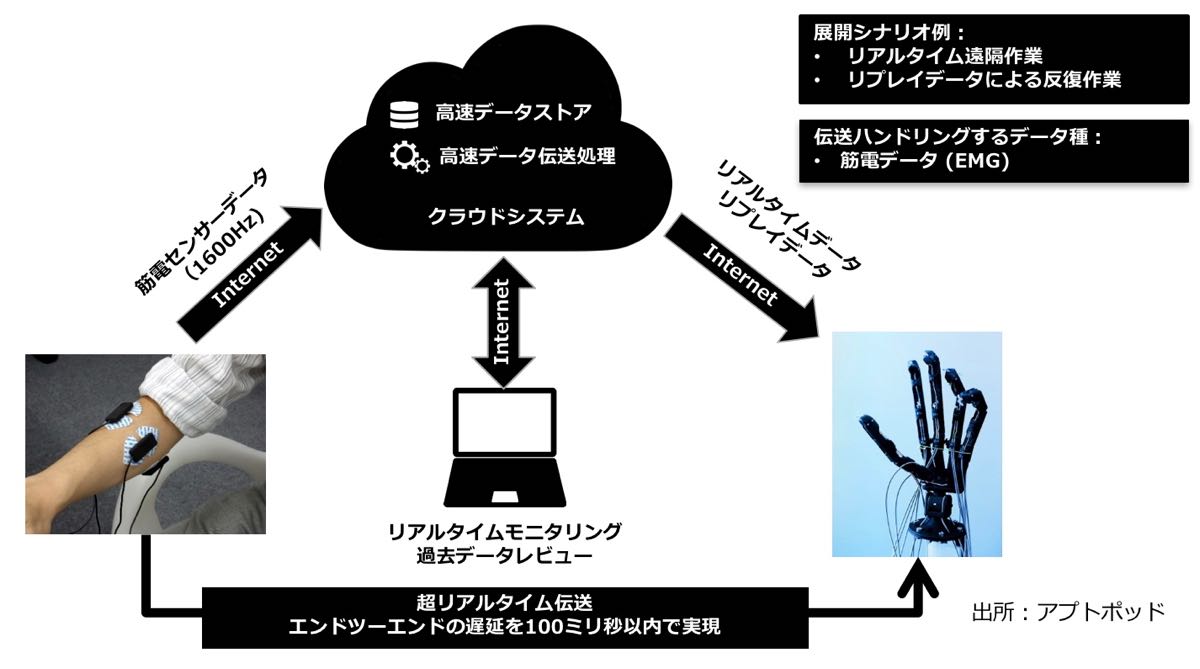
遠隔制御のユースケースとして、弊社がパートナーと取り組んでいるロボットハンドの遠隔制御を紹介する。操作者の腕に取り付けた筋電センサーのEMG(筋電パルス)信号をインターネット/クラウド経由で伝送し、ワイヤー駆動のロボットハンドを遠隔地から制御するモデルである。
筋電センサーからのEMG信号は数百マイクロ秒毎の超短周期で創出される。そのシグナルをエッジシステムからインターネット/クラウドを介して遠隔のロボットハンド側のエッジシステムにリアルタイム伝送することでロボットハンドを制御する。同時に、リアルタイムな動画を併用することで操作者による直感的な遠隔操作を実現する。
一度操作したデータはクラウドにストアできる。再生制御や模範的な操作をモデル化することも可能だ。こうしたリアルタイム遠隔制御を実用レベルで実現するにはファストデータのエンドツーエンド伝送を100ms以内の遅延に収める必要がある。
遠隔データの収集・分析・活用系と遠隔制御系という2つの基本シナリオをエッジシステムの通信面から見ると、前者は上り、後者は下り(または双方向)の通信がメインである。また前者にはリアルタイムのイベント処理(監視アラートなど)が必要な場合を除きリアルタイム性を要求されることが少ないのに対し、後者では、かなり低遅延なリアルタイム性が不可欠になる。
M2M/IoTのシステムとして実現するためには、これらの特性から機能要件に応じたインターネットプロトコルを選択・適用し、帯域に応じたデータ転送量を考慮しなければならない。さらにストアデータの分析および機械学習のアプローチも、いわゆるマーケットデータのような統計的な分析アプローチと違い、ファストデータの場合は時系列データの分析アプローチが必要になる。
次回からは、今回紹介した遠隔データの収集・分析・活用系と遠隔制御系の2つのユースケースに基づき、システム構築に検討すべき技術的アプローチと、弊社が直面した様々な技術課題の解決策を解説していく。
坂元 淳一(さかもと・じゅんいち)
アプトポッド代表取締役。大手外資系ソフトウェアベンダーのプロダクトマーケティングなどを経て2006年にアプトポッドを設立。コンサルティグ、ソフトウェア開発などを中心に、エネルギーやモビリティ、スマートシティなどの社会実証事業やPoCプロジェクトに従事。2013年よりM2M/IoTのファストデータ処理に特化したエンドツーエンドの汎用フレームワークとクラウドサービスを自社製品として提供を始め、自動車分野やロボティクス分野など、産業機械製品のコネクテッド化を推進する事業を展開している。